Bàn tay robot mạnh nhất thế giới chơi piano một cách mềm mại
Một nhóm khoa học gia tại Viện Máy móc & Vật liệu Hàn Quốc (Korea Institute of Machinery & Materials hay KIMM) đang chào hàng loại robot trong hình dạng bàn tay – được công bố là mạnh nhất thế giới, có khả năng thao tác với các vật thể nặng gấp 3 lần trọng lượng của nó, đồng thời còn thực hiện những nhiệm vụ đòi hỏi sự tinh tế như chơi đàn dương cầm, rót nước, …
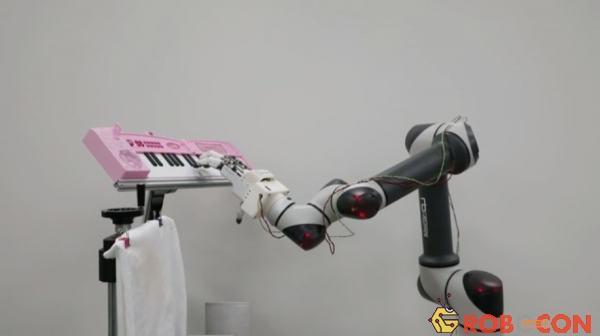
Bàn tay robot là thành quả nghiên cứu của các nhà khoa học tại Viện KIMM (Hàn Quốc). Ảnh: KIMM.
Bàn tay robot được chế tạo phỏng theo kích thước và chức năng của bàn tay người, tuy nhiên có ít hơn 1 ngón (4 ngón). Lòng bàn tay được tích hợp một bộ truyền động với chức năng điều khiển 12 mô-tơ và cử động của từng ngón tay với tổng số khớp [ngón tay] lên đến 16. Điều này cho phép ít nhất 2 ngón tay và các khớp của bàn tay chuyển động độc lập với nhau, giúp nó cầm nắm được những vật nặng hơn 3kg trong khi chỉ có trọng lượng khoảng 1 kg.
Theo các tác giả tại KIMM, cấu trúc như vậy đã giúp họ thiết kế được một bàn tay nhẹ và mạnh mẽ hơn hầu hết những bàn tay robot hiện có trên thị trường. Ngoài việc tạo ra lực bám lớn để chống lại trọng lượng của chính nó, bàn tay robot cũng có thể dễ dàng được gắn trên các cánh tay robot để tối ưu hóa tầm với.
Tuy nhiên, khả năng nâng vật nặng lại không phải là mối quan tâm chính. Nhóm phát triển còn tìm cách trang bị cho bàn tay robot các cảm biến lực và tiếp xúc ở đầu ngón tay, thân ngón tay và lòng bàn tay, giúp nó xác định và điều chỉnh cả hướng lẫn cường độ lực tác động khi tiếp xúc với những vật thể khác nhau. Nhờ đó, nó đã hoàn thành khá xuất sắc một số nhiệm vụ đòi hỏi sự công phu như rót nước ra ly, cắt giấy bằng kéo, cầm một quả trứng, hay thậm chí chơi một bản nhạc bằng dương cầm, …
“Bàn tay robot của chúng tôi được phát triển mô phỏng theo những chuyển động tinh tế của bàn tay người thật, để có thể thao tác với các vật thể khác nhau”, T.S Hyunmin Do – người dẫn đầu dự án- cho biết. “Ngoài ra, nó cũng sẽ được sử dụng như một nền tảng nghiên cứu nhằm phát triển các thuật toán quyết định năng lực thao tác thông minh của robot.”
- 'Nhà khoa học robot' năng suất làm việc gấp 1000 lần con... (Thứ sáu, 11:37:01 17/07/2020)
- Con robot đầy ám ảnh này đang hỗ trợ các xét nghiệm coronavirus... (Thứ năm, 13:19:07 16/07/2020)
- Robot xem video phẫu thuật, trở thành phụ tá của bác sĩ (Thứ Hai, 14:40:00 13/07/2020)
- Bahrain chế tạo thành công robot có khả năng tiêu diệt SARS-CoV-2 (Thứ bảy, 17:31:00 11/07/2020)
- Thế giới sẽ ra sao khi robot thay thế con người? (Thứ sáu, 16:02:00 10/07/2020)
- Hàn Quốc phát triển robot nhắc nhở giữ khoảng cách (Thứ tư, 14:32:04 08/07/2020)
- Kinh ngạc trước robot mini có thể thực hiện nhiệm vụ phức... (Thứ tư, 11:42:06 24/06/2020)
- Startup Việt chế tạo drone giao hàng, được cấp bằng sáng chế... (Thứ Ba, 09:36:00 05/05/2020)
- 5 sai lầm khó tránh khi dùng robot hút bụi (Thứ Hai, 11:50:06 04/05/2020)
- ĐH Công nghệ chế tạo robot nhắc đeo khẩu trang chống dịch... (Thứ Hai, 11:49:00 04/05/2020)
-
 Ngày tận thế
Ngày tận thế
Thứ bảy, 11:10:48 11/07/2020
-
 Thế giới động vật
Thế giới động vật
Thứ bảy, 11:09:44 11/07/2020
-
 Kiếm hiệp
Kiếm hiệp
Thứ sáu, 16:59:05 10/07/2020
-
 Trí tuệ nhân tạo
Trí tuệ nhân tạo
Thứ năm, 11:12:33 09/07/2020
-
 1001 câu hỏi tại sao
1001 câu hỏi tại sao
Thứ tư, 14:12:29 08/07/2020
-
.jpg "Điều gì sẽ xảy ra nếu bạn ngưng gội đầu trong vòng một năm?") Điều gì sẽ xảy ra nếu bạn ngưng gội đầu trong vòng một năm?
Điều gì sẽ xảy ra nếu bạn ngưng gội đầu trong vòng một năm?
-
 7 thảm họa thiên nhiên có thể sắp xảy ra
7 thảm họa thiên nhiên có thể sắp xảy ra
-
 Sự thật về chế độ máy bay và 20 bí mật về điện thoại của bạn
Sự thật về chế độ máy bay và 20 bí mật về điện thoại của bạn
-
 7 bí ẩn trên Trái đất đã khiến khoa học đau đầu cả nghìn năm qua mà vẫn chưa có lời giải
7 bí ẩn trên Trái đất đã khiến khoa học đau đầu cả nghìn năm qua mà vẫn chưa có lời giải
-
.jpeg "Các nhà thiên văn học bó tay trước sự tồn tại của hành tinh này") Các nhà thiên văn học bó tay trước sự tồn tại của hành tinh này
Các nhà thiên văn học bó tay trước sự tồn tại của hành tinh này
-
 Cơ hội hiếm hoi quan sát hành tinh màu xanh da trời vài ngày tới
Cơ hội hiếm hoi quan sát hành tinh màu xanh da trời vài ngày tới
Thứ tư, 20:00:05 20/01/2021
-
 EU cho hay: "Sâu bột an toàn, người có thể ăn được"
EU cho hay: "Sâu bột an toàn, người có thể ăn được"
Thứ Ba, 23:30:08 19/10/2021
-
 Hệ sao kỳ quái chưa từng thấy cách Trái đất 1.800 năm ánh sáng
Hệ sao kỳ quái chưa từng thấy cách Trái đất 1.800 năm ánh sáng
Thứ Ba, 22:50:01 19/01/2021
-
 Loài người có thể đơn độc trong vũ trụ
Loài người có thể đơn độc trong vũ trụ
Thứ Ba, 22:35:03 19/01/2021
-
 Chuyện về con nhện đi săn nhện: Thạo binh pháp như "Gia Cát Lượng", đầy mưu hèn kế bẩn để săn mồi bằng mọi giá
Chuyện về con nhện đi săn nhện: Thạo binh pháp như "Gia Cát Lượng", đầy mưu hèn kế bẩn để săn mồi bằng mọi giá
Thứ Ba, 21:27:01 19/01/2021
-
 Bức thư tiết lộ những năm cuối đời đầy đau đớn của Napoléon
Bức thư tiết lộ những năm cuối đời đầy đau đớn của Napoléon
Thứ năm, 21:35:09 14/01/2021
-
 Tàu chở hàng SpaceX lần đầu tự động tách khỏi trạm ISS
Tàu chở hàng SpaceX lần đầu tự động tách khỏi trạm ISS
Thứ năm, 21:16:02 14/01/2021
-
 Phát hiện chuẩn tinh cách Trái đất hơn 13 tỷ năm ánh sáng
Phát hiện chuẩn tinh cách Trái đất hơn 13 tỷ năm ánh sáng
Thứ năm, 20:45:09 14/01/2021